




|
JogAmp BOF @ Siggraph 2014 - Full Session Full session of our JogAmp BOF @ Siggraph 2014 in Vancouver, BC, Canada. Homepage: http://jogamp.org Event Page: http://jogamp.org/doc/siggraph2014/ On Site: Harvey Harrison, Rami Santina,... |



|
Ji Gong Talk @ FOSDEM 2014, Universite Libre de Bruxelles - Full Session February 1st, 2014 https://jogamp.org/doc/fosdem2014/ https://fosdem.org/2014/schedule/event/ji_gong_high_availability_jvm/ Ji Gong project focuses on empowering JVM technology and guaranteeing... |



|
JogAmp BOF @ Siggraph 2013 - Full Session Full session of our JogAmp BOF @ Siggraph 2013 in Anaheim Homepage: http://jogamp.org Event Page: http://jogamp.org/doc/siggraph2013/ On Site: Alan Sambol, Harvey Harrison, Rami Santina,... |


|
Hartverdrahtet (improved true 3D) by Akronyme Analogiker Currently experimenting with stereoscopic rendering and different methods for calculating the stereo pairs. The most simple method I guess is 'Toe-in' stereoscopy, where the camera has a fixed... |


|
OpenGL_S3D_ParallaxOcclusionMapping_HSBS_JOGL Currently experimenting with stereoscopic rendering and different methods for calculating the stereo pairs. The most simple method I guess is 'Toe-in' stereoscopy, where the camera has a fixed... |



|
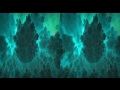
OpenGL_S3D_Mandelbrot3D_HSBS_JOGL Currently experimenting with stereoscopic rendering and different methods for calculating the stereo pairs. The most simple method I guess is 'Toe-in' stereoscopy, where the camera has a fixed... |



|
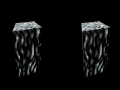
OpenGL_S3D_Mandelbulb_HSBS_JOGL Currently experimenting with stereoscopic rendering and different methods for calculating the stereo pairs. The most simple method I guess is 'Toe-in' stereoscopy, where the camera has a fixed... |


|
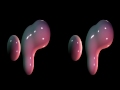
OpenGL_S3D_Metaballs_HSBS_JOGL Currently experimenting with stereoscopic rendering and different methods for calculating the stereo pairs. The most simple method I guess is 'Toe-in' stereoscopy, where the camera has a fixed... |



|
OpenGL_S3D_QuaternionicJuliaSet_HSBS_JOGL Currently experimenting with stereoscopic rendering and different methods for calculating the stereo pairs. The most simple method I guess is 'Toe-in' stereoscopy, where the camera has a fixed... |



|
JogAmp Talk @ FOSDEM 2013, Universite Libre de Bruxelles - Full Session JogAmp Fast Media & Processing regardless whether the JVM is slow or not. Teaser: http://youtu.be/SQUvzr3HVuc https://fosdem.org/2013/schedule/event/jogamp_fast_media_processing/ JogAmp @... |


|
JogAmp Talk @ FOSDEM 2013, Universite Libre de Bruxelles - Teaser JogAmp Fast Media & Processing regardless whether the JVM is slow or not. Full session: http://youtu.be/dL6wQ6wk6aU https://fosdem.org/2013/schedule/event/jogamp_fast_media_processing/ JogAmp... |



|
JogAmp BOF @ Siggraph 2012 - Full Session Full session of our JogAmp BOF @ Siggraph 2012 in LA. Teaser (5 min.): http://youtu.be/7mBi7psP7VM Homepage: http://jogamp.org On Site: Rami Santina, Sven Gothel, Xerxes Ranby, Julien Gouesse,... |



|
JogAmp BOF @ Siggraph 2012 - Teaser Teaser of our JogAmp BOF @ Siggraph 2012 in LA. Full session: http://youtu.be/gYoj2s18GxU Homepage: http://jogamp.org On Site: Rami Santina, Sven Gothel, Xerxes Ranby, Julien Gouesse, Wade... |



|
OpenGL_FractalBitmapOrbitTrappig_Julia_Overview_T01-T39_JOGL An overview of nearly ~40 variations of my fragment shader that calculates a Julia-set fractal, but instead of coloring the fragments using the iteration count of the IFS, the shader analizes... |



|
OpenGL_FractalBitmapOrbitTrappig_Julia_Transform_T36_JOGL Another quick fragment shader variation that calculates a julia-set fractal, but instead of coloring the fragments using the iteration count of the IFS, the shader analizes the sequence of... |



|
OpenGL_FractalBitmapOrbitTrappig_Julia_Transform_T34_JOGL Another quick fragment shader variation that calculates a julia-set fractal, but instead of coloring the fragments using the iteration count of the IFS, the shader analizes the sequence of... |



|
OpenGL_FractalBitmapOrbitTrappig_Julia_Transform_T33_JOGL Another quick fragment shader variation that calculates a julia-set fractal, but instead of coloring the fragments using the iteration count of the IFS, the shader analizes the sequence of... |


|
OpenGL_FractalBitmapOrbitTrappig_Julia_Transform_T30_JOGL Another quick fragment shader variation that calculates a julia-set fractal, but instead of coloring the fragments using the iteration count of the IFS, the shader analizes the sequence of... |



|
OpenGL_FractalBitmapOrbitTrappig_Julia_Transform_T29_JOGL Another quick fragment shader variation that calculates a julia-set fractal, but instead of coloring the fragments using the iteration count of the IFS, the shader analizes the sequence of... |



|
OpenGL_FractalBitmapOrbitTrappig_Julia_Transform_T28_JOGL Another quick fragment shader variation that calculates a julia-set fractal, but instead of coloring the fragments using the iteration count of the IFS, the shader analizes the sequence of... |